Abstract
Purpose
As transcranial magnetic stimulation (TMS) is used widely in clinical diagnosis and treatments, precise stimulation is a requirement for reliable results. Since the mechanisms underlying TMS treatment are not yet fully understood and also little is known about an optimal coil orientation for a specific target region, often ‘standard’ coil orientations are used. Clinically, the ‘best’ coil orientation is estimated as a rule of thumb, and recent research studies investigating the optimal coil orientation have been very coarse. There are just ‘detailed’ studies investigating the hand region, but detailed in this context means in rotation steps of 45° [1]. For stimulating the leg a left-to-right coil orientation (for the right foot) is the standard orientation. In this investigation we show that the standard orientation is suboptimal. This is done with a robotized and navigated system for a precise and repeatable stimulation.
Materials
We used a MC-B70 Butterfly coil with a slight bent for focused stimulation that was connected to a MagPro X100 stimulator with MagOption (MagVenture A/S, Farum, Denmark) for biphasic stimulation. Measurement and recording of motor evoked potentials (MEP) was accomplished using a 2 channel DanTec Keypoint Portable (Alpine Biomed Aps, Skovlunde, Denmark) with surface electrodes. For placing and holding the coil precisely, we used a robotized system that is based on an Adept Viper s850 serial six joint robot (Adept Technology, Inc., Livermoore, CA, USA) and a Polaris infrared stereo-optical tracking system (Northern Digital Inc., Waterloo, Ontario, Canada) [2]. Motor threshold was estimated using the threshold hunting method proposed by Awiszus [3]. So far, n=5 healthy male subjects, aged 24-30 years, were investigated.
Methods
We performed the MEP recordings on the abductor hallucis muscle of the right foot. First, we used the median of 5 subsequent stimulations in standard orientation and a grid with a distance of 1 cm for hot spot search. Subsequently, we placed the coil at the hot spot again and rotated the coil from 0° to 80° clockwise, starting with the typical coil orientation, while keeping a tangential orientation. For the different coil rotations, we performed the motor threshold estimation.
Results
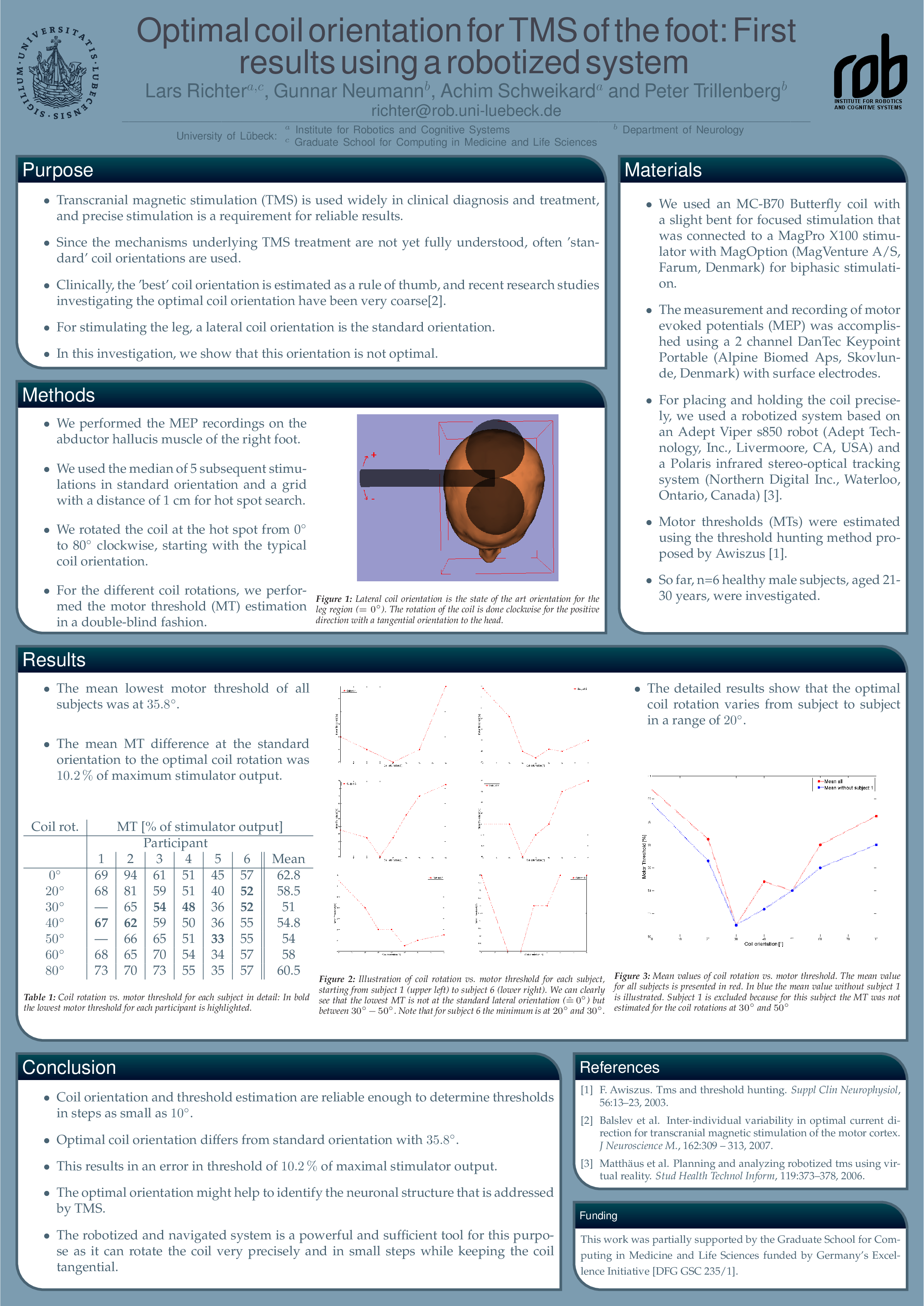
We found that the mean lowest motor threshold of all subjects was at 38° with a standard deviation (SD) of 7.5°, rotating the coil clockwise starting from the typical left-to-right orientation. The mean difference of the motor threshold at the standard orientation to the optimal coil rotation for each subject was 11.2% of maximum stimulator output.
Conclusion
This investigation has proven the importance of a precise and accurate coil orientation and position for TMS. We have shown that the optimal coil rotation for stimulating the foot (abductor hallucis muscle) varies 38° from the standard coil orientation. Therefore, we propose to investigate optimal orientations for other muscles and brain regions. The robotized and navigated system is a powerful and sufficient tool for this purpose.